Hands-on
Chef’s Hat Cup 3: The Final Ingredient
Location:
Tutors:
- Pablo Barros (UPE)
- Luciana Lins (lml@ecomp.poli.br)
- Alexandre Rodolfo (UPE)
- Nathalia Cauas (UPE)
Capacity:
10
Description:
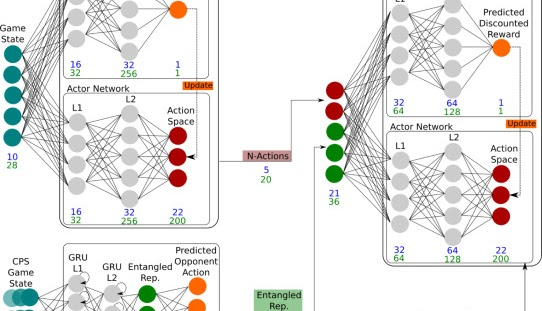
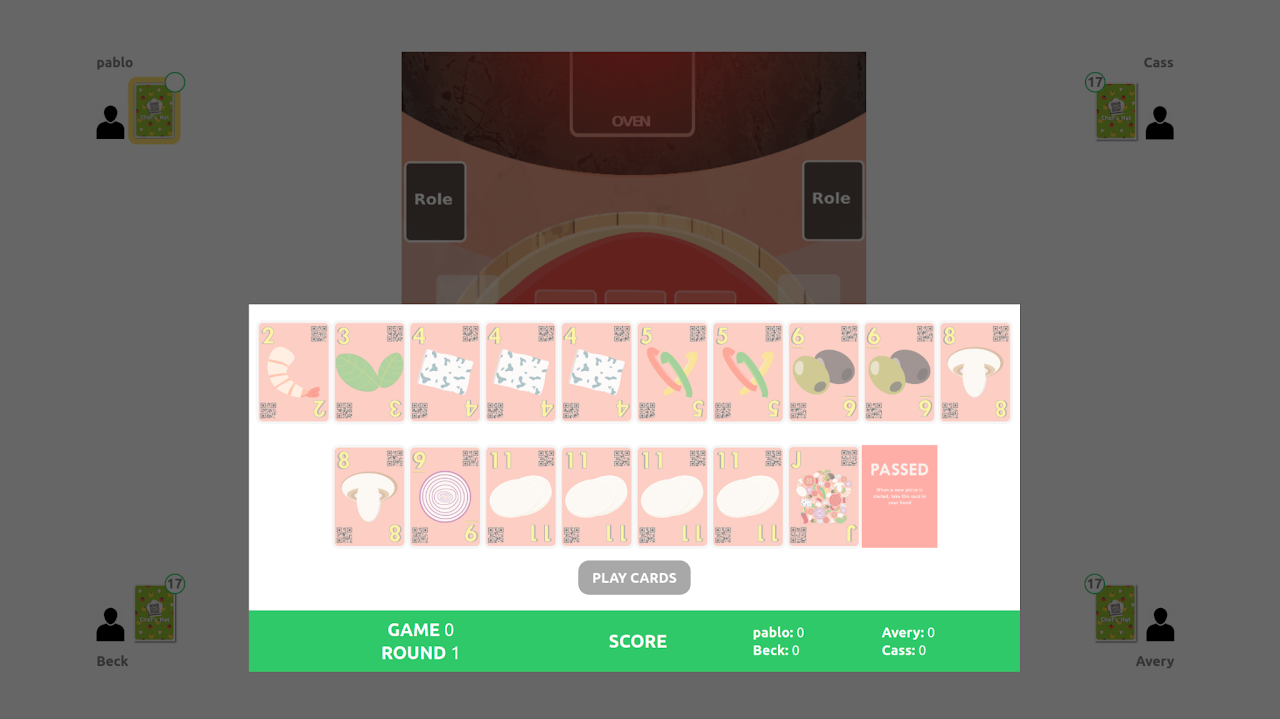
Most current reinforcement learning solutions for competitive learning, although inspired by real-world scenarios, focus on a direct mapping between the agent's actions and the environment’s state in terms of space and reward. That translates to agents that can adapt to dynamic scenarios, but, when applied to competitive cases against humans, fail to assess and deal with the impact of their fast-adapting opponents. In most cases, when these agents choose an action, they do not consider how their opponents can affect the state of the scenario. In competitive scenarios, the agents have to learn decisions that a) maximize their goal, and b) minimize their adversaries' goal. Besides dealing with complex scenarios, such solutions would have to deal with the dynamics between the Agents themselves. In this regard, social reinforcement learning is still behind the mainstream applications and demonstrations of the last few years. We introduce here the Chef's Hat Cup: Revenge of the Agent! That is our third version of the competition that aims at the development of the most challenging artificial players!
Requirements:
- Basic knowledge of Python
The hands-on will feature the following content
- What is Chef's Hat
- Chef's Hat Simulator
- Building your own agent
- Compete!
Resources:
- Projector/ White board
- Students bring their own notebook
- At least 4 notebooks available, if needed
- Simulator
Gallery

HO1: Computational Design of Soft Robots
Location:
Tutors:
- Stefan Escaida
- Benjamín Pichún
- Carlos Rosel
Capacity:
Description:
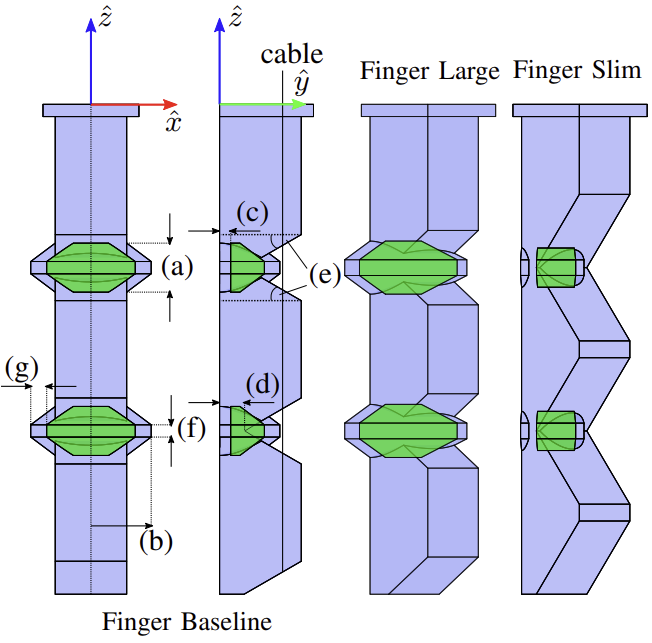
Designing Soft Robots is a challenging task, especially the co-design of actuation and sensing capabilities. Using state of the art simulation in SOFA, in this hands-on activity we will demonstrate how optimal designs of a sensorized cable-driven soft finger can be found with a multi-objective optimization approach. To explore the design space efficiently, we propose the use of the high-performance computing infrastructure available at UOH.
Requirements:
- Experience with Linux and the use of the command line terminal
The hands-on will feature the following content
- Introduction to Multi-objective optimization, pareto optimality
- Parametric design of the soft finger
- Using the HPC@UOH to run the optimization
- Fabrication and testing of optimal designs
Resources:
Gallery
HO2: Legged robot leg mechanism
Location:
Tutors:
- Ulises Campodónico (UChile)
- Francisco Cáceres (UChile)
- Fernando Navarrete (UChile)
- Lucas Garrido (UChile)
Capacity:
10-15
Description:
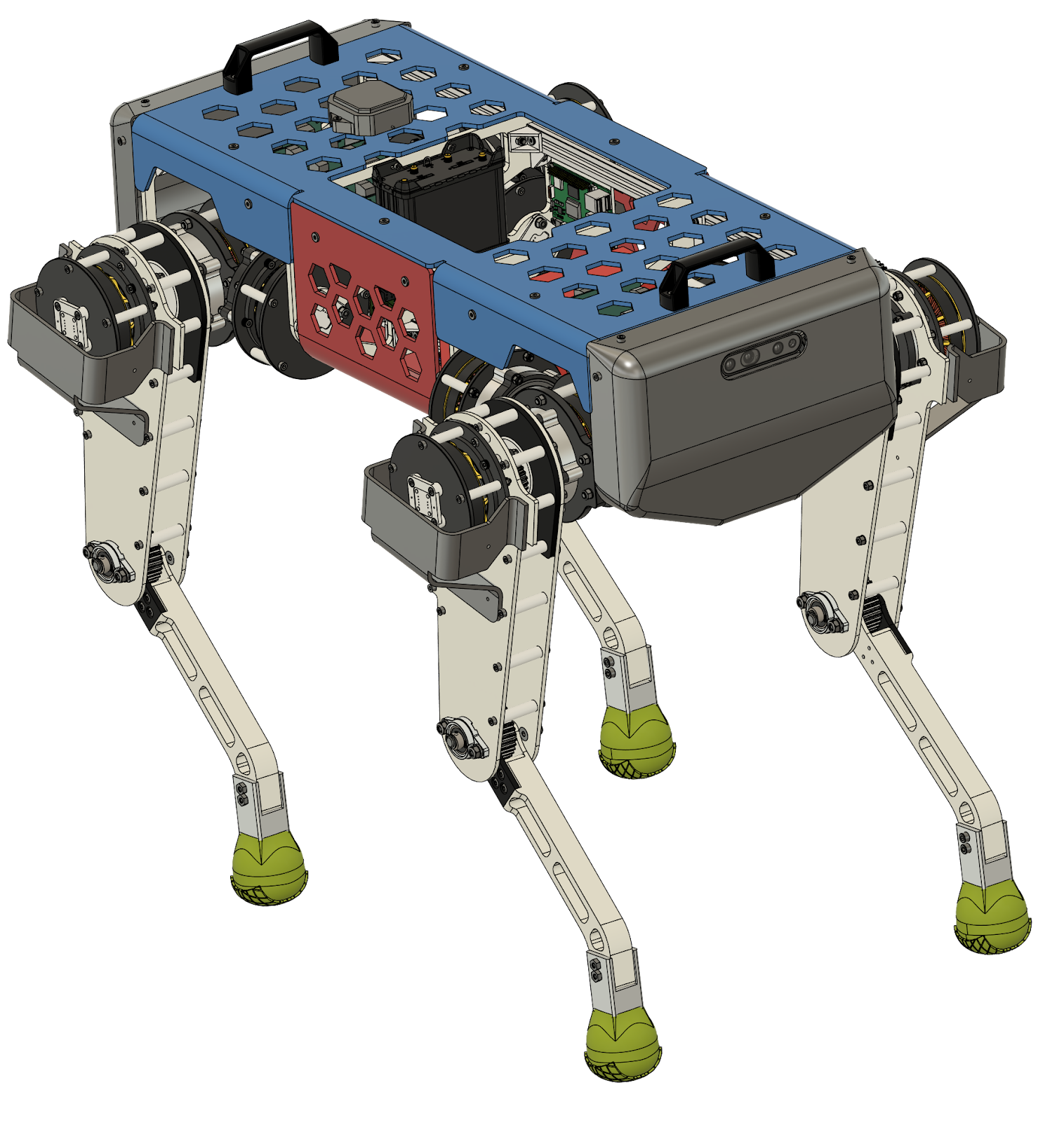
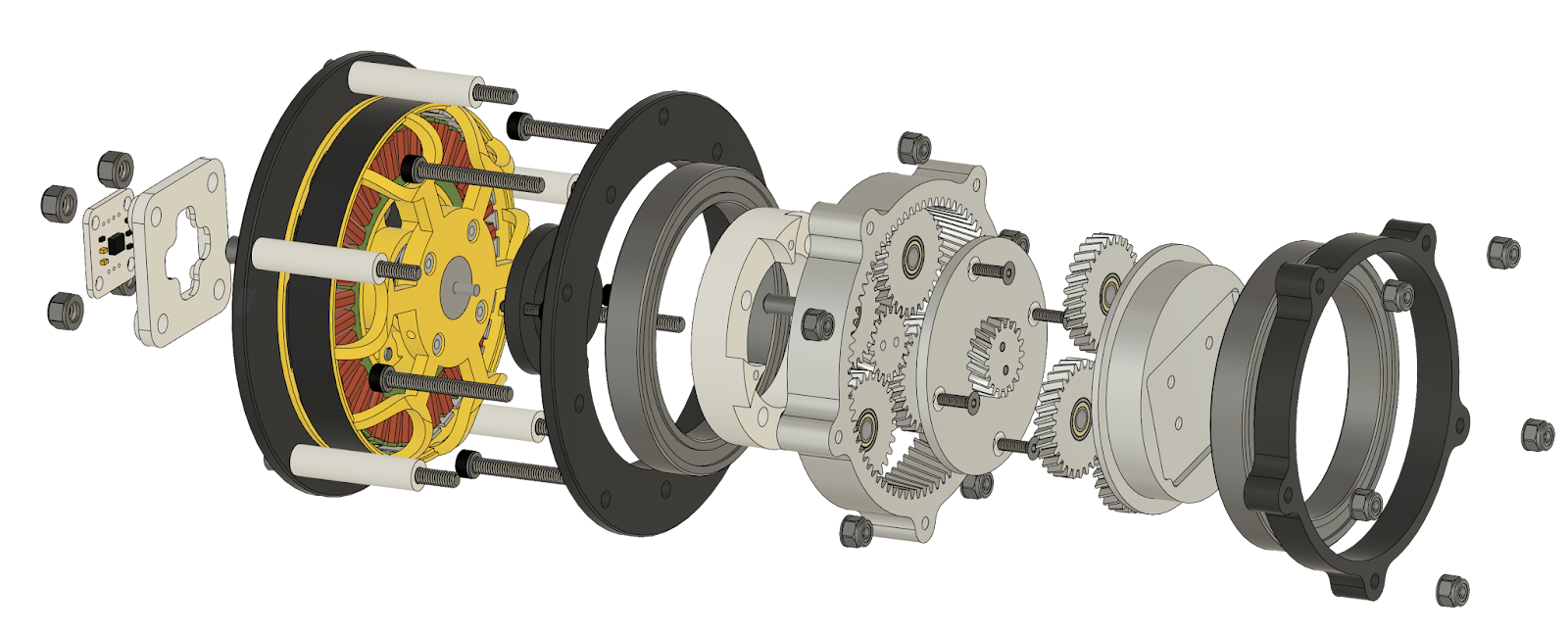
The workshop addresses the design, calculation, assembly, and closed-loop control of a planetary gearbox to amplify BLDC motor torque. The workshop will cover parts identification, actuator assembly, and closed-loop commissioning using the SimpleFOC Arduino library.
The hands-on will feature the following content
- Introduction. Examples of walking robots, component recognition.
- Gearbox design.
- Gearbox assembly in groups of 2-3 people.
- Closed-loop actuator control with Arduino.
- MuJoCo simulation
Resources:
Gallery
HO3: Cherry Detection for Precision Agriculture
Location:
Tutors:
- Rodrigo Verschae (UOH)
- Luis Cossio (UOH)
- Fabián Escobar (UOH)
Capacity:
15-20
Description:
Recent applications of artificial intelligence in precision agriculture, particularly computer vision and deep learning tools, have succeeded in automating and optimizing processes for characterizing fruit tree fields. Fruit counting is important for resource planning, labor management, and overall field management. This hands-on workshop focuses on developing software that enables automated cherry detection using the YOLO neural network and the CherryCO Database. Deep Learning with YOLO and the CherryCO Database, Field trip with testing of detection in Cherry plantation
Requirements:
- Experience using Python programming language.
- Experience using the command line terminal
The hands-on will feature the following content
- Introduction to neural networks.
- AI software design and programming.
- Using collab train the YOLO neural network.
- Field trip with testing of detection in Cherry plantation.
Gallery

HO4: 3D Reconstruction Using Nerfstudio Software
Location:
Tutors:
- Rodrigo Verschae (UOH)
- Nicolás Araya (UOH)
- Ariel Zúñiga (UOH)
Capacity:
20
Description:
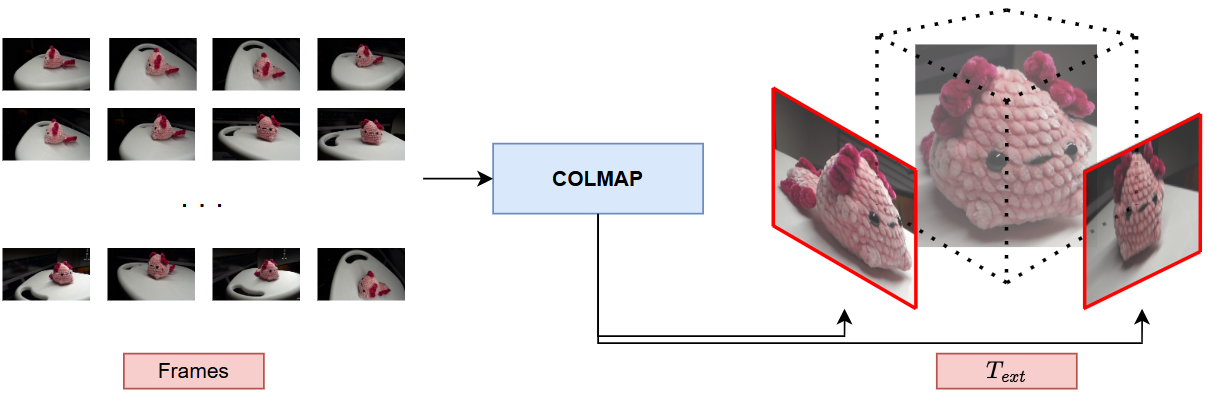
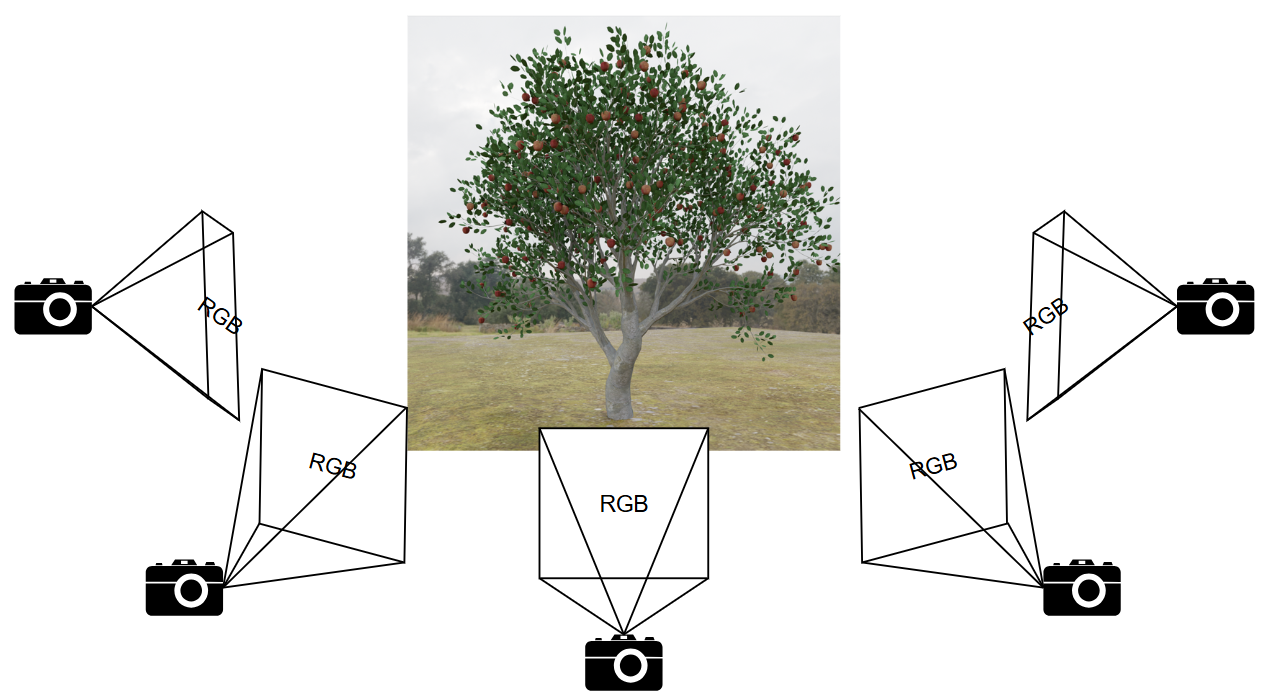
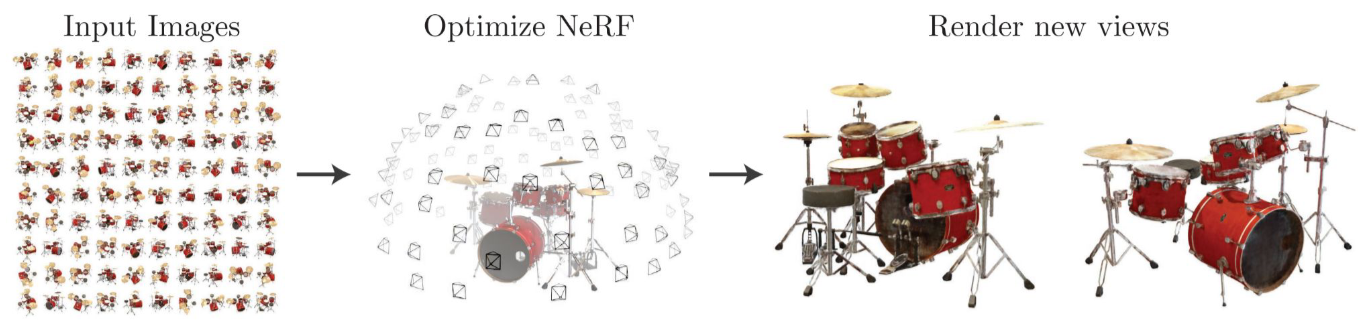
This hands-on explores a pipeline compatible with Nerfstudio software to train different frameworks of Neural Radiance Fields applied for reconstruction in different environments and objects. The main idea is the understanding of neural radiance fields and a creation of a dataset using simply mobile phones videos and nerfstudio tools that you can use under Google Colaboratory.
The hands-on will feature the following content
- What is Nerfstudio
- Why 3D reconstruction
- What is NeRF
- Create your own dataset
- Google Colab Activity
Gallery
LACORO Warehouse RL Challenge 2025
Location:
Universidad de O'Higgins, Building A, Floor 2
Tutor:
- Simón Martínez-Rozas (simon.martinez@uantof.cl)
Capacity:
Description:
The LACORO Warehouse RL Challenge 2025 is a simulation-based competition focused on developing Reinforcement Learning (RL) agents capable of navigating safely and efficiently within a warehouse environment shared with simulated human workers (actors). The simulation is built on Gazebo Fortress and integrates with ROS 2 for real-time robot data management and environment interaction. The competition is open to Undergraduate, Master's, and PhD students, who must participate in teams of up to four members. The winning team of the LACORO Warehouse RL Challenge 2025 will receive a cash prize of 200 USD, in addition to official recognition during the LACORO Summer School closing session.
Requirements:
- ROS 2 and Gazebo simulation (recommended)
- Reinforcement Learning fundamentals (recommended)
- Perception and sensor data processing (recommended)
- Software engineering and robotic systems integration (recommended)
- Quad-core CPU or higher
- At least 16 GB RAM
- Dedicated NVIDIA GPU (recommended for training)
The hands-on will feature the following content
- Introduction to RL and warehouse simulation
- ROS 2 and Gazebo Fortress setup
- Developing RL agents
- Competition and evaluation
Resources:
Gallery
